
-
 コピーしました
コピーしました
-

-

-

ふつうにロボットと一緒に働く、学ぶ、癒す、食べる社会
注目されるロボット技術
サービスロボットに求められるロボット技術は広範囲かつ発展途上
ロボットを単純化して捉えると、センサーなどの入力デバイスから、何らかの「変位」が電気信号に変換されてシステムに入力され、システム内の制御ロジックにしたがって、アクチュエーターなどの出力デバイスが物理的運動を行うもの、と言うことができます。
一般的な工業用ロボットは人と協働したり、人が側にいないことが想定されたりするので、入力・出力・制御とも、ある程度限られた技術で実現できます。しかし人と協働する工業用ロボットやサービスロボットの場合、用いられる技術の範囲が大きく広がります。ここではサービスロボットを前提に、入力・出力・制御それぞれで採用される可能性のある技術をピックアップしてみましょう(図1)。
ロボットに用いられる技術

出所:三菱総合研究所
サービスロボットに用いられる技術分野はこのように多岐に及んでいます。工学分野の中ではしばしばロボット工学と一括りにされますが、構成する技術の要素は機械、情報、通信、化学などいろいろな技術を統合したものなのです。例えば人との協働が前提ならば、人とロボットの間の距離は正確に把握される必要があり、人と接触しても人に危害が及ばないように材質や制御も配慮されるべきです。こういった条件をクリアした上で、さまざまなアプリケーションを実現するのがサービスロボットです。サービスロボットに用いられる技術はすでに実用の域に達しているものもありますが、人との協働に最適な技術という観点ではまだ発展途上のものもあります。以下、今後の発展が見込まれる技術について見ていきましょう。
注目のロボット技術の動向
統合触覚センサー
触覚センサーは人間の五感の一つである「触覚」に相当するものです。人間は、対象物に触れている時に、どれくらいの力で対象物に触っているか、その対象物を持ち上げた時にすべりが発生するかなどを、総合的に知覚できます。一方で現状の触覚センサーは単純な力の検知をベースにした単機能なものが大半で、一つの入力デバイスで微妙な力加減を面的に測定することはまだ実現できていません。
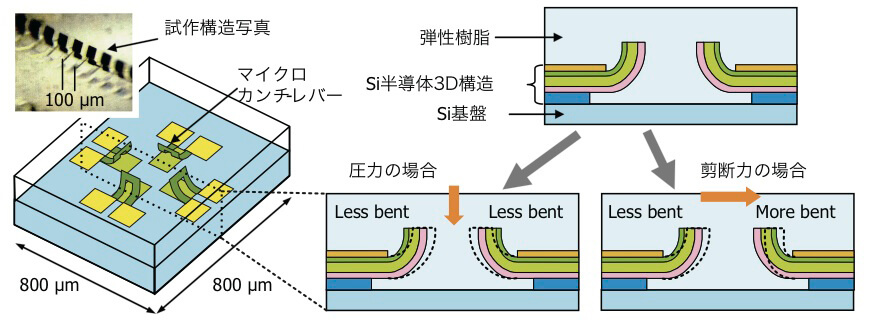
しかし、センサー統合の研究は多方面で進められています。例えばATR(国際電気通信基礎技術研究所)ではMEMS(微小電気機械システム)技術を応用した統合接触センサーの開発を研究しています。この統合接触センサーの一つである集積多軸触覚センサーは図2のような構造になっており、圧力と剪断(せんだん)力を同時計測することでロボットが対象物をつかむ際に最適な力でつかめるよう制御することが可能になっています。
集積多軸触覚センサーの基本構造
注:当技術開発は野間春生立命館大学教授により立命館大学ならびに新潟大学にて継続実施中
出所:ATR 知能ロボティクス研究所(IRC)「MEMS触覚センサ」
https://irc.atr.jp/research_project-2/human_beh_ana2010/mems_sensor2010/
(閲覧日:2020年1月29日)
BMI/筋電センサー
ロボットの自律制御を実現する技術だけでなく、人がロボットをコントロールする際の制御技術も高度化が進められています。従来と大きく異なる制御技術としてあげられるのが、脳活動の計測・解析に基づく「Brain Machine Interface (BMI)」と、筋肉が動く際の電気信号の計測・解析に基づく「筋電センサー」です。これらは人の生体信号を利用した入力系であることが特徴で、「手指の動き」そのものよりも上流の、動作意図や意思決定などの「人の意思」を利用するという点が革新的です。
BMI/筋電センサーのコア技術は生体信号計測と信号処理です。BMIは脳波や脳磁場、脳血流量などを生体信号として利用し、筋電センサーは文字どおり筋電位を生体信号として利用します。これら生体信号は極めて微弱で、外部ノイズを排除するために、例えば脳波計測では電磁波を遮断したシールドボックスが必要など、現状では利用環境に制限があります。しかし電極などの計測装置の性能向上や、機械学習を利用したパターン識別・状態推定手法の発展により、一般的な環境の中でも、しかも持ち運び可能な機器を使っての計測が可能になってきています。場所を選ばず、簡易で高精度なデータ計測・分析技術によって、BMI/筋電センサーがコモディティ化していくことが期待されます。
BMI/筋電センサーは「人の意思」を利用した機器制御であることから、例えば義手を動かす、車いすを動かすといった身体に障害をもった方々の利用が想定されてきました。しかし最近になって、自分の両手を使いつつ脳波を利用してロボットアームを操作するBMIの実験結果が報告されるなど(図3)、身体機能の「代替」・「補助」だけでなく「拡張」する技術が実現しつつあります。
両手を使いながら脳波を利用してロボットアームを操作するBMI

出所:科学技術振興機構(JST)「世界初、思うだけで操れる3本目の腕」
https://www.jst.go.jp/pr/announce/20180726/index.html
(閲覧日:2020年1月29日)
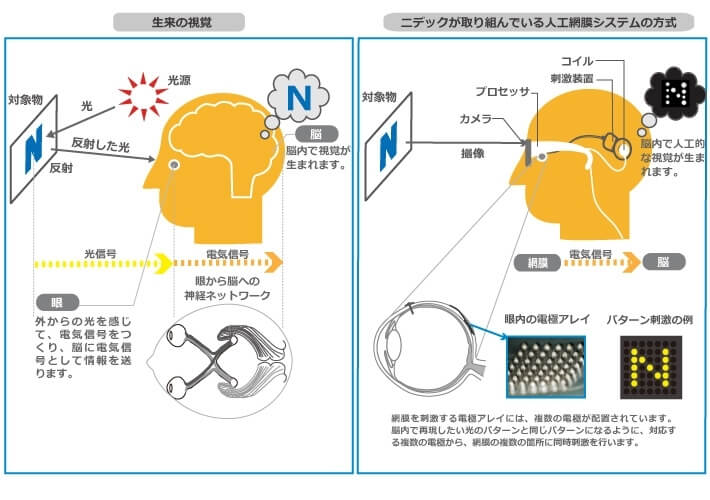
また、特にBMIについては、運動出力機能だけでなく、感覚入力機能として利用する期待が生まれています。具体的な研究としては、目や耳といった感覚器官の代わりに外界情報を受信・処理して、脳内の感覚野に信号を送信することで知覚意識を誘発するBMIの開発が進められています(図4)。出力面だけではなく入力面でも脳と機械がつながることは、人とロボットの「連携」が、「シームレスな融合」というステージに移行する重要な局面であることを示します。それは人の身体経由では困難な、高速・高精度・大規模な処理の実現に期待がもてると同時に、倫理的な視点による議論の成熟が求められることも意味しています。
人工網膜システムの例
出所:株式会社ニデック「人工視覚の種類」
https://www.nidek.co.jp/company/artificial_sight/about_artificial_sight/type.html
(閲覧日:2020年1月29日)
AI/クラウドロボティクス
AIのロボット制御への応用は、すでに工業用ロボットにおいて開始されています。サービスロボットへの適用については、よりきめ細やかな制御が求められるのでAIの適用は必要性が増す一方、制御を高度化していく必要があります。
まずは単体で動作するロボットの制御にAIが適用されていくことになるでしょう。しかし制御が高度化するにつれ、AI専用のチップを併用したとしてもロボット単体の処理能力では限界がくることが予想され、方向としてはクラウドコンピューターのCPUパワーも併用した制御に移行していくことになると考えられます。クラウドを併用して制御することで、複数のロボットを連携させて制御することも可能になるうえ、ロボット単体から得られるデータだけでは個別最適しかできなかったものが、複数のロボットから得られる大量のデータをAIにより処理することで全体最適によるロボットの制御も可能になることが期待できます。
クラウドが大量のロボットを制御するようになると、処理の遅延が問題になる可能性もあります。その場合、ロボットとクラウドコンピューターの間にエッジコンピューターが設置されることになるでしょう。急を要する対応やクラウドに上げるまでもないデータはエッジコンピューターが処理することで高速化が図られ、クラウドコンピューターに上げるデータの前処理もエッジコンピューターが担うことによって、システム全体のレスポンスが向上します。
クラウドロボティクス全般において、自律動作を行うロボットとエッジ/クラウドコンピューターとの通信は基本的に無線接続されることになります。無線方式(Wi-Fi、4G(LTE)/5G など)にかかわらず、無線である以上は伝送路の品質を保証できないという原則があり、通信部分はベストエフォートにならざるを得ません。つまり通信が瞬間的に途絶した場合を想定しておく必要がありますが、実用化にあたっては通信部分だけでなく、システム全体としてロボットが人に危害を与えないフェイルセーフメカニズムが強く求められます。
人工筋肉
人工筋肉とは、人間の筋肉を機械的に実現しようとするものです。さまざまな方式が試みられていますが、現状は大きな空気圧発生器が必要であったり、発生する力が小さいなどの欠点があるため、サービスロボットに最適な方式はまだ確立されていません。現在検討されている方式の中では、導電性高分子素材を使った人工筋肉が注目されつつあります。例えば豊田合成とアドバンスト・ソフトマテリアルズ社が開発したのは、通電すると伸縮する次世代ゴム素材「e-Rubber」です。「e-Rubber」を使った人工筋肉はゴムそのものが伸縮するため、ロボットアームとして活用した場合、電動モーターなどに比べて滑らかで柔らかい動きが可能です(開発中)。アクチュエーターとしての機能に加えて、センサーとしての機能も実現されており、将来的にはアクチュエーターとセンサーを一つの素材で実現することを目指しています。
e-Rubberを用いたロボット
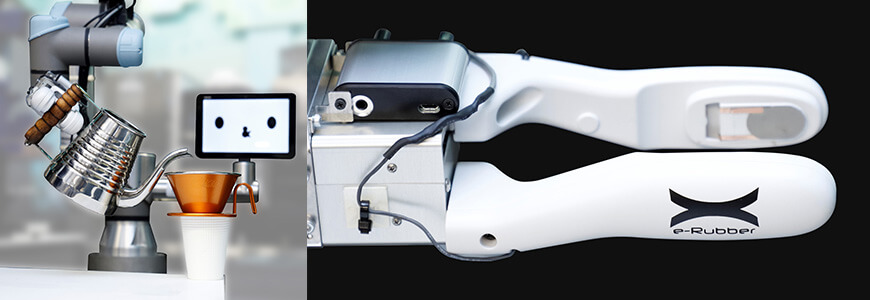
注:e-Rubberを圧力センサーとして用いたロボットの例で、ロボデックス2020に出展されたバリスタロボ。左図はバリスタロボ全景、右図は触覚ハンド部分の拡大。
出所:豊田合成株式会社「e-Rubberをロボデックス展に出展」
https://www.toyoda-gosei.co.jp/news/detail/?id=859
(閲覧日:2020年1月29日)
今後の展望
工業用ロボットにはすでに歴史も実績もあり、必要とされる技術はおおむね実用化されています。しかし人と協働・共生するサービスロボットに必要な技術は発展途上のものが多いのが実状です。ですが、おそらく5~10年後にはほぼ実用の域に達し20年後にはより高度な域まで達していると思われます。
課題としては、冒頭に書いたようにサービスロボットに必要な技術は多岐に及ぶため、企業・大学・国の研究機関の連携が必須になることです。日本に根強く残っている自前主義から脱して、広くアライアンスを組むことによって、実用可能なサービスロボットが完成するのではないかと考えます。
サイバー空間では日本はすでにメジャーな存在でなくなってきていますが、ロボットにはリアルがある上に人と協働・共生するためには繊細なチューニングも必要とされるため、日本が強みを発揮できる分野だと言えます。ただし、リアル、サイバー両面で存在感を増している中国は国を挙げてロボット分野に注力し始め、急速に力をつけて来ており、油断をすればあっという間に抜き去られかねない状況になっています。日本のエンジニア・研究者のこれからの頑張りに期待すると同時に、国や企業もそのバックアップをしていく必要があります。
-
コピーしました
-
-
-